



KZ-100 Motion kontrolieris
- Modeļa Numurs: KZ-100
- Sertifikācija: NAV
- DIY Piederumi: ELEKTRISKĀ
- Zīmola Nosaukums: PDV
- Izcelsme: KN(Izcelsmes valsts)
-
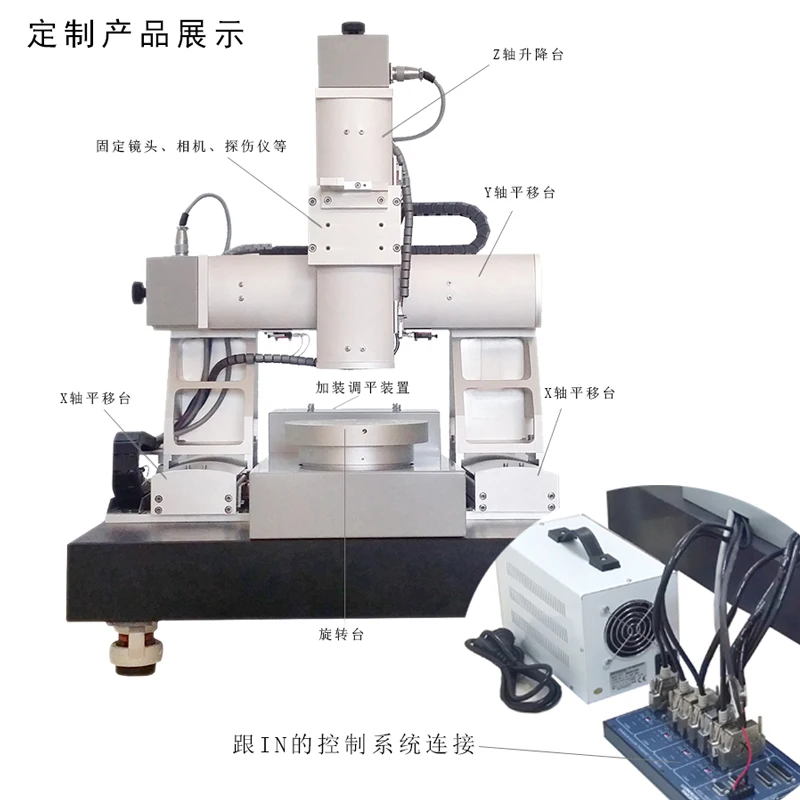
1、Vispārīgi
Mobilo posmā kontrolieris/draiveris tiek izmantots, lai braucot 2-posms stepper motor.Tas var vadīt 4 motoriem neatkarīgi visvairāk.Jūs varat izmantot savu kontrolētu stick, lai padarītu motoru palaist/apturēt manuāli.Tā arī var kontrolēt DATORU, izmantojot RS232 interfeisu.
2、Savienojums
(1) X-DIR:Savienot ostas X virzienā stepper motor mobilo posmā, izmantojot DB9(sieviešu)-DB9(vīrietis) kabeli.Savienošanas/Atvienošanas tikai tad, kad IZSLĒGTA!
(2) Y-DIR:Savienot ostas Y virzienā stepper motor mobilo posmā
izmantojot DB9(sieviešu)-DB9(vīrietis) kabeli.Savienošanas/Atvienošanas Tikai tad, kad IZSLĒGTA!
(3) Z-DIR:Savienot ostas Z virzienā stepper motor mobilo posmā, izmantojot DB9(sieviešu)-DB9(vīrietis) kabeli.Savienošanas/Atvienošanas tikai tad, kad IZSLĒGTA!
(4) L-DIR:Savienot ostas L virzienā stepper motor mobilo
posmā, izmantojot DB9(sieviešu) - DB9(vīrietis) kabeli.
Savienošanas/Atvienošanas tikai tad, kad IZSLĒGTA!
(5) RS232:RS232 ports, Pieslēgšana RS232 ports PC。
(6) DC18V3A(Strāvas Padeve):, Izmantojot MAIŅSTRĀVAS adapteri piederumu。
3、Plānošanas
(1) Uz mobilo posmā kontrolieris/mašīnists sazinās ar DATORU, izmantojot interfeisu RS232;
(2) RS232 prototips:Bodu likmes, 57600,nav paritātes,8data biti,1stop biti;
(3) Metode:PC sūta 1 baits uz mobilās skatuves kontrolieris/vadītājs, tad pagaida mobilo posmā kontrolieris/vadītāja nosūtot atpakaļ baitu 0Dh(ASCII Atgriešanās), līdz šim PC var sūtīt nākamo baits uz mobilās skatuves pārzinis/autovadītājs.Atkārtoju iepriekšējo procedūru, lai pabeigtu 4-baitu komandu。
(4) Nosūtīt sinhronās komandu pirms nosūtīšanas programmēšanas komandu.
Sinhronā komanda: 55h, 55h, AAh, 55h;
(5)
1. baits
2. baits
3. baits
4. baits
Apraksts
00h
00h-X ātrumu
Bit15~bit8 no
Bit7~bit0 no
Uzstādīt ātrumu ass X 、
Programmēšanas komandu.Katrā programmēšanas komanda sastāv no 4 baitu,aprakstīta tabulā:
01h-Y ātrums
02h-Z ātrums
03h-L 速度
ātrums
ātrums
Y 、 Z 、 L , vērtība
starp-512 līdz +511, izmantojot 16bits parakstīts heksadecimālo.
01h
××h*
××h*
××h*
Augšupielādēt uz priekšu/atpakaļ ierobežot signālu biti un amats
vērtību ass X,Y,Z,
L. definīcija augšupielādēto datu raksturo šāds piemērs.
04h
Bit23~bit16 vērtība attālums
X
Bit15~bit8 vērtība attālums
X
Bit7~bit0 vērtība attālums
X
Set X ass motoru palaist noteiktu attālumu mikro soļi stepper motors, vērtību attālums
starp -223~223-1 ,
izmantojot 24 bitu parakstīts heksadecimālo. , 1microstep=1/12800 kārta stepper motor。
05h
Bit23~bit16 vērtība attālums
Y
Bit15~bit8 vērtība attālums
Y
Bit7~bit0 vērtība attālums
Y
Komplekts Y ass motoru palaist noteiktu attālumu mikro soļi stepper motors, vērtību attālums
starp -223~223-1 ,
izmantojot 24 bitu parakstīts heksadecimālo. , 1microstep=1/12800 kārta stepper motor。
06h
Bit23~bit16 vērtība attālums
Z
Bit15~bit8 vērtība attālums
Z
Bit7~bit0 vērtība attālums
Z
Uzstādīt Z ass motoru palaist noteiktu attālumu mikro soļi stepper motors, vērtību attālums
starp -223~223-1 ,
izmantojot 24 bitu parakstīts heksadecimālo. , 1microstep=1/12800 kārta stepper motor。
07h
Bit23~bit16 vērtība attālums
L
Bit15~bit8 vērtība attālums
L
Bit7~bit0 vērtība attālums
L
Komplekts L ass motoru palaist noteiktu attālumu mikro soļi stepper motors, vērtību attālums
starp -223~223-1 ,
izmantojot 24 bitu parakstīts heksadecimālo. , 1microstep=1/12800 kārta stepper motor。
* ××h : Baits jebkura vērtība, bet tā nevar izlaist 。
Komandu Set
funkcijas
Obligāti formu tips
Funkciju apraksts
Piezīmes
piemērs
Noteikt braukšanas ātrumu
SXn;
SYn;
SZn;
SLn;
X ceļo ar ātrumu n
Y ceļo ar ātrumu n
Z ceļo ar ātrumu n
L ceļo ar ātrumu n
n=-4096~4095
speedV(Rotācijas/otrais)=n× 5 5 /220
SX100;
SY-234;
SZ1000;
SL4095;
Augšupielādēt datu
UX;
UY;
UZ;
UL;
ASV;
UM;
UH;
Augšupielādēt X atrašanās vietas datu
Augšupielādēt Y atrašanās vietas datu
Augšupielādēt Zlocation datu
Augšupielādēt L atrašanās vietas datu
Upload Limits Datu Augšupielādes Darbības Režīmā Datu
Augšupielādēt Nulles Datu
Atgriež 9 baiti
Atgriež 9 baiti
Atgriež 9 baiti
Atgriež 9 baiti
Atgriež 1 baitu
Atgriež 1 baitu
Atgriež 1 baitu
UX;
UY;
UZ;
UL;
ASV;
UM;
UH;
Izveidot darbības virzuļsūkņi
DXn;
Din;
DZn;
DLn;
X ceļošanas, pārvietošanās n
Y ceļojumu pārvietošanās n
Z ceļojumu pārvietošanās n
L travel pārvietošanās n
n=-230~230-1
Vienība:Microstep
1Microstep=360/12800degree=0.028125 grāds
DX350;
DY-9987;
DZ-3456; DL100020;
Iestatītu Maksimālo Ātrumu
MXn;
MYn;
MZn;
Milj. latu;
Maksimālā ātruma ierobežojums X ir n.
Maksimālā ātruma ierobežojums " Y n.
Maksimālā ātruma ierobežojums Z ir n.
Maksimālā ātruma ierobežojums L-n.
n=0~32767
speedV(Rotācijas/otrais)=n× 5 5 /220
MX2560;
MY200;
MZ1002;ML4096;
Patvaļīga ātruma režīmu (Skatīt turpmākie piemēri (attēli)
NXn;
NYn;
NZn;
NLn;
Sagatavot ātruma kontroles data传,N ir periodu skaits.
n=0~682(OnlyX)
n=0~341(Tikai useXY) n=0~170(XYZorXYZL)
NX50;
NL120;
LTn;
Lejupielādēt laiks datus n
n=0~230
LT100000;
LAn;
Lejupielādēt paātrinājuma dati n
n=-32767~32767
LA256;
RXn;
Rina;
Tvaiku melnu;
RLn;
X Atkārtojumu Skaits
Y Atkārtojumu Skaits
Z Atkārtojumu Skaits
L Atkārtojumu Skaits(Atkārtojums = Kopā Darbojas Vairāki-1)
n=0~65535
RY132;
RZ384;
TMn;
Sākties jebkurā ātrums
Cheng.N ir kanāls, kontroles vērtību un summu, ko veido svērtās vērtības kanālus patvaļīga ātruma režīmu.
Definīcija: Dalība patvaļīga ātruma režīmu, piemēram:
X-kanāls svērto vērtību 1;
Y-kanāls svērto vērtību 2;
Z-kanāls svērto vērtību 4;
Tagi: sr2ez, kz zs6, squier, kz zst, bluetooth zs3, kz headphon, kz edx skaidrs, tumi, sullen, timeway.
-
Uzrakstīt recenziju
Saistītie Produkti














Recenzijas (0)